A. Pengertian Balance
Roda Balance adalah kondisi yang seimbang dari sebuah obyek yang berputar. Balance dibagi menjadi dua jenis yaitu static balance dan dynamic balance.
- Static balance adalah keseimbangan bobot dalam arah radial pada kondisi statis,
- Dynamic balance adalah keseimbangan bobot dalam arah aksial pada kondisi berputar
 |
| Gambar 1. Ilustrasi tipe balan roda |
Static Balance
Titik yang berjarak/berjari-jari sama dari poros harus mempunyai bobot yang sama, sehingga jika roda diputar titik sembarang/ tertentu dari roda akan dapat berhenti pada sembarang posisi. Kondisi inilah yang disebut static balance
 |
| Gambar 2. Ilustrasi tipe unbalance roda |
 |
| Gambar 3. Kondisi balance dan unbalance |
Jika roda yang dalam keadaan unbalance berputar maka gaya centrifugal yang bekerja pada titik unbalance akan lebih besar, sehingga akan cenderung menarik keluar dari poros dan menyebabkan gaya pada poros menjadi tidak seimbang. Hal tersebut dapat menyebabakan poros menjadi bengkok dan atau menyebabkan getara radial pada saat roda berputar.
 |
| Gambar 4. Ilustrasi kondisi unbalance saat berputar |
Dengan menempelkan beban yang sama dengan bobot unbalance pada titik yang posisinya berlawanan (180 derajat ) maka ketidakbalanan (unbalance) dapat dihilangkan sehingga efeknya juga akan ikut hilang, karena gaya centrifugal yang bekerja pada semua arah sama besarnya.
 |
| Gambar 5. Pengimbangan gaya menjadikan kondisi balan |
Pada aplikasinya, memasangkan bobt balance di telapak ban sangat sulit dilakukan, sehingga untuk mengantisipasi hal tersebut pemasangan bobot balance dibagi menjadi 2 dan di pasang pada sisi pelek.
 |
| Gambar 6. Pemasangan bobot balan |
Dynamic Balance
Keseimbangan bobot dalam arah aksial pada saat roda berputar dinamakan dynamic balance.
 |
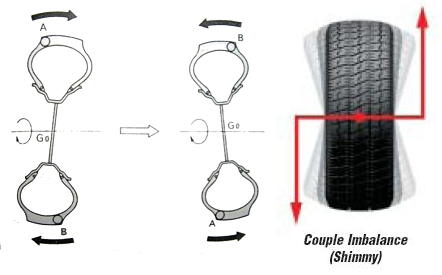
| Gambar 7. Kondisi unbalance |
Dari gambar di atas misalnya, bobot ekstra A dan B menyebabkan roda tidak balance. Garis yang mengubungkan pusat bobot dari gaya berat G1 dan G2 tidak berada pada sekeliling garis pusat roda, sehingga saat berputar titik g1 dan g2 cenderung mendekati garis pusat roda.
Setiap roda berputar 180 derajat seluruh gaya yang ditimbulkan oleh kecenderungan tersbut menjadikan timbulnya getaran lateral mengikuti ayunan putaran roda. Kondisi ini menyebabkan steering wheel shimmy, yaitu ayunan menlingkar dari steering wheel.
 |
| Gambar 8. Dynamic balance |
Pemasangan bobot balance pada kondisi dynamic unbalance adalah dengan memasangkan bobot yang sebanding dengan ketidakbalannnya pada arah yang berseberangan. Pada aplikasinya di roda, bobot dipasangkan pada pelek roda, sebagaimana terlihat pada gambar berikut :
 |
| Gambar 9. Pemasangan bobot balan untuk dynamic unbalance |
B. Dimensi Roda
Pengenalan dimensi/ukuran roda diperlukan untuk melakukan proses balancing roda dengan menggunakan mesin balancer. Ukuran roda yang dijadikan informasi saat melakukan balancing adalah diameter pelek dan lebar pelek. Dengan membaca dimensi yang tertulis pada sisi pelek kita dapat mengetahui ukurannya.
Misalkan tertulis 5.00 S x 20 F.B. mempunyai arti :
5.00 : Lebar pelek dalam inchS : Bentuk flens pelek (lihat tabel)20 : Diameter pelekF.B. : Nama pelek (Flat Base)
Misalkan pada sisi ban tertulis 195/ 70 R 14 86 H mempunyai arti :
195 : lebar ban dalam mm70 : persentase perbandingan antara tinggi dan lebar banR : ban jenis radial14 : diameter pelek dalam inch86 : indek beban (lihat tabel load index)H : indek kecepatan (lihat tabel speed index)
C. Mesin Balance
Alat yang digunakan untuk mengetahui besarnya unbalance/imbalance dari suatu roda dinamakan mesin balance. Mesin balance ada dua tipe yaitu on the car balance dan off the car balance. Untuk menjamin hasil yang optimal sebaiknya menggunakan mesin balance yang off the car karena ketelitiannya tinggi dan lebih mudah dioperasionalkan. Mesin balance sekarang ini merk dan modelnya bermacam-macam.
 |
| Gambar 10. Mesin balan |
Dalam menjalankan mesin balance secara umum membutuhkan empat macam input data yaitu : tipe pelek, diameter pelek, lebar pelek dan jarak roda dari acuan mesin balance.
Secara urutan proses balancing dengan mesin balancer dapat dilihat pada postingan dibawah ini
D. Run-Out
Hal lain yang perlu diperhatikan pada pengecekan roda adalah run-out. Lingkaran roda tidak benar-benar bundar. Variasi radius putar (run-out) yang belebihan akan mengakibatkan getaran pada body, sehingga harus dibatasi nilainya.
 |
| Gambar 11. Pemeriksaan Run-Out |
Run-out adalah frekuensi dimensi roda selama berputar.
Ada dua macam run-out yaitu radial run-out dan lateral run-out.
- Radial run-out adalah kesempurnaan bentuk lingkaran dari roda. Ketidaksempurnaan tersebut disebabkan oleh kondisi ban, pelek dan posisi axle hub yang tidak tepat. Roda dengan radial run-out jika berputar, radius putarnya akan berubah-ubah sehingga akan menggetarkan body dan steering.
- Lateral run-out adalah fluktuasi ban pada arah aksial yang akan mengakibatkan keausan ban tidak normal pada ban dan pengemudian menjadio tidak stabil. Penyebab lateral runout adalah dinding sampin ban yang bengkok, rim yang rusak dan posisi axle hub yang tidak tepat
Posting Komentar
Cara bicara menunjukkan kepribadian, berkomentarlah dengan baik dan sopan…